I am currently a Principal Staff Engineer at Xiaomi Auto, leading the development of Xiaomi's City NOA and the affiliated simulation infrastructure. In 2021, Xiaomi, often regarded as China's Apple Inc., acquired DeepMotion, an autonomous driving company I co-founded in 2017. At DeepMotion, where I served as the R&D director, I led the mapping team and built a robust and low-cost HD mapping system from scratch. I was also deeply involved in all aspects of the autonomous driving stack, including data curation, perception, localization, planning, and control. Before DeepMotion, I spent most of my time researching stereo matching and 3D reconstruction at Microsoft Research Asia, in a joint PhD program affiliated with Sun Yat-Sen University.

Spearheaded City NOA's PnC team.
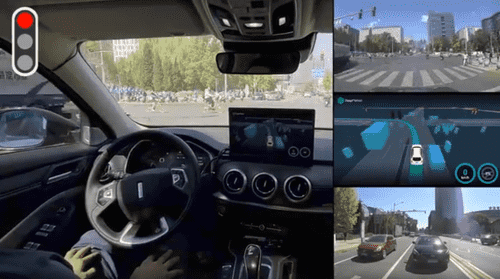
Work showcased by Xiaomi's CEO, Jun Lei, during Xiaomi AD's debut in 2022.8, featuring capabilities like lane changes, unprotected left-turns, and pedestrian yielding. [Xiaomi AD Video].
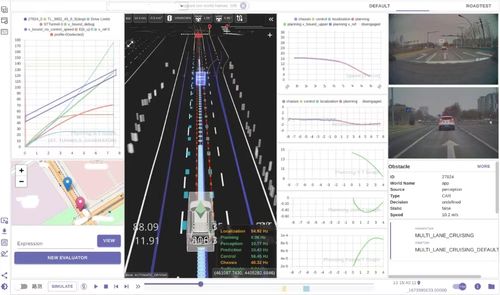
Spearheaded Xiaomi's simulation team.
Created a full-featured simulation infrastructure supporting log replay, deterministic simulation, and tailored case-wise evaluations.

Led the visual localization collaboration with SAIC, China's largest automaker.
Utilized semantic detection for enhanced localization accuracy and robustness, detailed in IROS'21. [DT-Loc Video] [DT-Loc PDF].
Achieved autonomous navigation for trucks in narrow toll lanes (only 40 cm wider than the truck) under unstable GNSS conditions.
Enabled SAIC's heavy trucks to operate autonomously at Shanghai Yangshan port, the world's largest deep water port, transporting over 40,000 containers per year. [News Link 1] [News Link 2].

Directed the surround perception collaboration with SAIC.
Developed and deployed surround perception system on R-Car H3 chip, with only 0.384 TFLOPS, in contrast to today's Orin X 5.3 TFLOPS + 275 TOPS.
Successfully integrated into SAIC's Marvel R, whose parking features received significant positive user feedback. [News Link 1] [News Link 2].
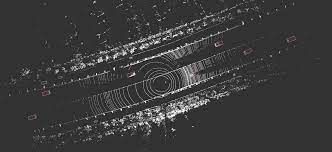
Directed the LiDAR perception collaboration with SAIC.
Deployed the LiDAR perception module for SAIC's heavy-duty trucks.
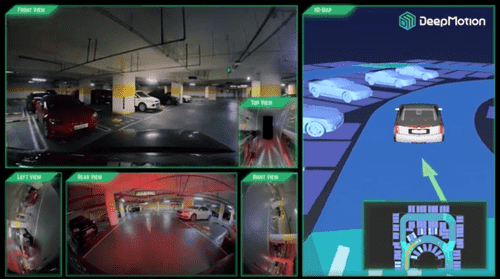
Led the AVP system creation, allowing users to leave their vehicles at mall entrances for autonomous parking.
Introduced AVP-Loc for robust localization in GNSS-challenged parking areas, presented in IROS'21. [AVP-Loc PDF].
Achieved industry-first support for multi-storey AVP. [AVP Video].
Led the development of DeepMotion's map-based urban PnC system, facilitating autonomous navigation in complex urban scenarios like Beijing's Zhongguancun. [Urban Drive Video].
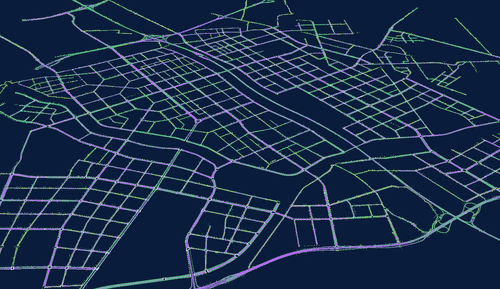
Headed DeepMotion's mapping team, devising an end-to-end HD mapping solution, including
Accomplished 10X cost reduction against traditional systems such as HERE and AMap.
Provided mapping services to industry partners like NavInfo, SuperMap, Tumeng, and White Rino.
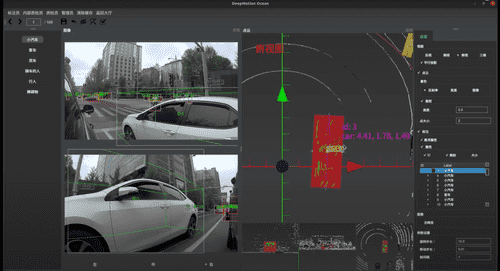
Headed an in-house, crowdsourced labeling system to control labeled data quality and to reduce costs.
Offered comprehensive labeling capabilities, from 2D to 4D, supporting various autonomous driving tasks. [ 2D/3D Labeling Video][ 4D Labeling Video].
The system kickstarted perception R&D initiatives at DeepMotion.

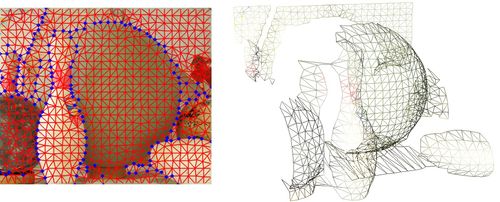
Transferred tech to Airbus for airplane tolling accident prevention, with real-time depth estimation and SLAM applications.
Applied tech for railway crossing accident prevention, enabling real-time obstacle detection and map registration.
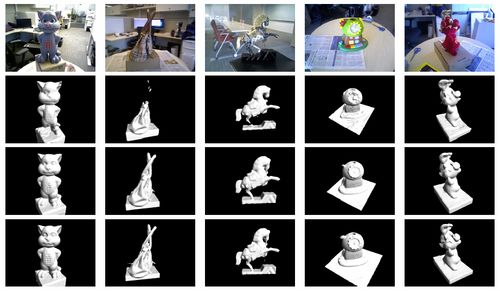
Researched into structure from motion, RGB-D based object reconstruction, and recognition.
Developed a virtual garment fitting system. [Virtual Fitting Video 1][ Virtual Fitting Video 2].
Contributions published in CVPR'16. [PDF].